Erste Vorstellung
Theorie
Hardware
- Baugruppen
Software
- Entwicklung
- Quellcode
Ergebnis
Das Team
Quellen und Links
Hardware
Der Roboter besteht aus einer Reihe von Bauteilen und Komponenten, die im folgenden beschrieben werden
sollen. Die Metallteile wurden von unserer Uni-Werkstatt angefertigt, die Elektronik haben wir in
Einzelteilen bestellt und zusammengelötet. Die SMD-Platinen wurden von Achim Kittel und Jens Reemts am PC entworfen
und ebenfalls von der Uni-Werkstatt hergestellt. Die Lochrasterplatinen wurden von uns gelötet, der Entwurf wurde fertig
übernommen.
Aufbau
 Das Roboterchassis
Das Roboterchassis
Die Grundplatte bildet die Basis des Roboters. In der Querachse sind die Motorblöcke des Fahrwerks links und rechts montiert.
Der Drehpunkt liegt also genau im Mittelpunkt der Grundplatte. Der Schwerpunkt wird durch die Anordnung der Motoren und des Akkus
ins hintere Drittel verlagert. Ein am Heck des Roboters angeschraubter Löffel übernimmt die Aufgabe des stützrades.
Dadurch erreichen wir eine gute Stabilität mit geringer Reibung bei einfacher und flexibler Montage.
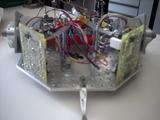 Ansicht von hinten
Ansicht von hinten
Das Akkupack mit acht Mignonzellen ist zwischen den Motoren gelagert. Wir haben im vorderen und hinteren Bereich Platz auf der
Längsache für die Maussensoren eingeplant, weswegen die Stepperboards für die Motoren senkrecht im hinteren Bereich an
die Grundplatte geschraubt wurden.
 Ansicht von vorne
Ansicht von vorne
Im vorderen Bereich des Roboters wurde mit Hilfe einer Kunststoffschale die Platine des ATmega32-Prozessors angebracht.
Die Platine sitzt somit rutschfest und isoliert. Die Halterung wurde aus den Bauteilen eines Metallbaukastens gebaut und an dem
Chassis befestigt. Der IR-Empfänger wurde mit den Metallstreben erhöht über der Mikroprozessorplatine angebaut.
Auch hier eignete sich das Metallspielzeug hervorragend für die Konstruktion. Der Empfänger wurde mit einem
kleinen Röhrchen abgeschirmt, um einen Einfallsektor von ca. 3° zu bekommen. Ganz vorne sitzen die Abstandsensoren und
die Kollisionstaster. Die Abstandsensoren wurden leicht nach außen gerichtet, um Störungen ausschließen
zu können. Die Kollisionsfühler schirmen mit Stahldraht die komplette Front des Roboters ab, und sind so geschaltet,
daß eine lückenlose Abtastung bei gleichzeitiger Erkennung der Kontaktseite realisiert wurde.
 Ansicht von oben
Ansicht von oben