Erste Vorstellung
Theorie
Hardware
- Baugruppen
Software
- Entwicklung
- Quellcode
Ergebnis
Das Team
Quellen und Links
Baugruppen
Der Roboter besteht aus einer Reihe von Bauelementen die im folgenden näher erläutert werden.
Alle Bauelemente werden mit Hilfe von Schrauben und Trägern eines Metallspielzeugs an der Grundplatte montiert. Da der
Infrarotsender LD274 eine Richtcharakteristik hat und in einem Winkel von 180 Grad abstrahlt, wäre es das Einfachste,
ihn senkrecht nach oben hinzustellen. Begünstigend kommt noch hinzu, daß die Reichweite unabhängig vom
Abstrahlwinkel ist. In Messungen haben wir jedoch festgestellt, daß die Richtcharakteristik nicht ganz 180 Grad
beträgt. Aus diesem Grund haben wir den Sender senkrecht nach unten ausgerichtet, da wir anfangs den Empfänger in
Höhe der Abstandssensoren montiert hatten und vermeiden wollten, daß das Feuer unterlaufen wird. Der Arm des Senders
wirft keinen nennenswerten Schatten, sodaß wir das Leuchtfeuer nach höherer Montage des Empfängers nicht
umbauten.
Die Möglichkeit eines Überlaufen des Signals ist durch die begrenzte Reichweite nicht gegeben.
 Das Leuchtfeuer
Das Leuchtfeuer
Der IR-Sender
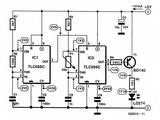
Das zu suchende Ziel ist ein Infrarotsender, der ursprünglich als Lichtschranke entworfen wurde. Die
Schaltung wurde aus der Zeitschrift Halbleiterheft 2003 entnommen und auf eine Lochrasterplatte gelötet.
Anschliessend wurde die Platine an einen kleinen Metallmast angebracht. In der folgenden Abbildung
ist die eingescannte Schaltung dargestellt. Der Aufbau unserer Platine entspricht im Wesentlichen dieser Darstellung.
Anstatt der zwei Oszillatoren TLC555 (7555) haben wir einen TLC556 (7556) verwendet. Versorgt wird die Platine
mit 4,8 V aus vier Mignonakkus.
In der Mitte der Schaltung liegt der IC2, der ein über das Potentiometer eingestelltes 36-kHz-Signal auf die Infrarotdiode D1
ausgibt. Das Potentiometer bildet zusammen mit dem Kondensator C3 einen Schwingkreis, welcher den IC2 extern triggert.
Das 36-KHz-Signal wird mittels des IC1 auf 300 Hz getaktet. Dieser erhält seine Triggerfrequenz von einem
Schwingkreis, der aus dem Kondensator C1 und dem Widerstand R2 gebildet wird.
Aus Zeitgründen haben wir die Schaltung nicht selbst überarbeitet, sondern aus der Beschreibung heraus nachgebaut.
 Der IR-Sender
Der IR-Sender
Während der ersten Testmessungen stellten wir fest, daß wir zwar nach Justierung des Potentiometers das
notwendige 36-kHz-Signal erhielten, dieses aber mit 600 Hz moduliert war. Nach einer Frequenzmessung an dem Ausgang
des IC1 stellten wir dort die 600 Hz fest. Daraufhin erhöhten wir die Kapazität des Kondensators C1 um den Faktor 2
auf 20 nF um die Aufladezeit zu verdoppeln. Dadurch halbierten wir die Frequenz und wir erhielten an der Infrarotdiode das
erwartete Signal von 36 kHz , welches mit 315 Hz getastet war. Der Empfänger registrierte daraufhin das Signal weswegen
wir die 15 Hz Abweichung als unwesentlich betrachteten.
Die maximale Reichweite unseres Senders betrug im Test ca. einen Meter, obwohl wir bei einer Lichtschranke mit mehr gerechnet
haben. Eine Modifizierung der Schaltung würde sicherlich die Reichweite erhöhen, allerdings empfanden wir die kurze Reichweite
für Testläufe in kleinen Räumen als angenehm, da das Signal nicht im ganzen Raum zu sehen war.
Der IR-Empfänger
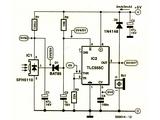
Der Empfänger der Platine ist auf ein Infrarotsignal mit 36 KHz Frequenz abgestimmt. Um bei Empfang einen Gleichstrom zu
erhalten, wird die 300-Hz-Modulation mittels der Diode D1 und dem Kondensator C1 gleichgerichtet. Der Reset-Eingang erhält
bei einem 36-kHz-Signal einen konstanten Strom, weswegen der Ausgang am IC2 auf Low liegt. Bei der Lichtschranke war
ursprünglich ein Summer geplant, der bei einer Unterbrechung des IR-Signals summt.
 Der IR-Empfänger
Der IR-Empfänger
Wir haben diesen Summer weggelassen, da wir
die Ausgangsspannung des IC2 an einen Pin der Microcontrollerplatine auslesen wollen. In unserer Schaltung liegt an diesem Pin ein
konstanter Strom von 3,4 Volt an, wenn kein IR-Signal empfangen wird. Der Microcontroller liest diese Spannung als High-Bit ein. Wird ein
Signal empfangen, sinkt die Spannung unter die 2,5 Volt Mindestspannung ab, und der Microcontroller interpretiert diese als 0-Bit.
Somit ist der IR-Empfänger leicht in unsere Elektronik einzubinden und wir sind in der Lage, den IR-Empfänger an einem einzelnen Pin zu
überwachen.
Die komplette Seite der Zeitschrift mit Begleittext haben wir zur Information mit aufgenommen:
 Die Infrarotlichtschranke
Die Infrarotlichtschranke
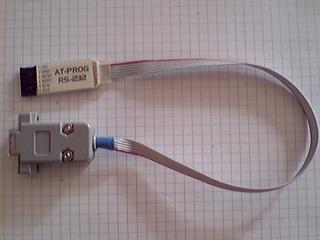
Der Programmieradapter
Zur Programmierung des Microcontrollers nutzten wir das Programm AT-PROG. Hierfür musste ein Adapterkabel angefertigt werden,
welches eine serielle Schnittstelle des PC mit der Platine verband. Eine Beschreibung dazu fanden wir im Internet
(Siehe Quellen und Links).
Die folgenden Bilder wurden uns freundlicherweise vom Autor zur Verfügung gestellt. Diese stellen sowohl einen Schaltplan, als auch die
Abbildung des Kabels und der einfachen Elektronik dar, nach denen das Kabel nachgebaut wurde.
 Der Schaltplan
Der Schaltplan
 Das Verbindungskabel
Das Verbindungskabel
 Der SubD-Stecker
Der SubD-Stecker
Wir hatten mit unserem Programmieradapter und
dem Beschreiben des Programmspeichers keinerlei Probleme festgestellt und können das Programm in Verbindung mit diesen Adapter
weiterempfehlen.