Erste Vorstellung
Theorie
Hardware
-
Baugruppen
Software
-
Entwicklung
-
Quellcode
Ergebnis
Das Team
Quellen und Links
Das Roboterchassis
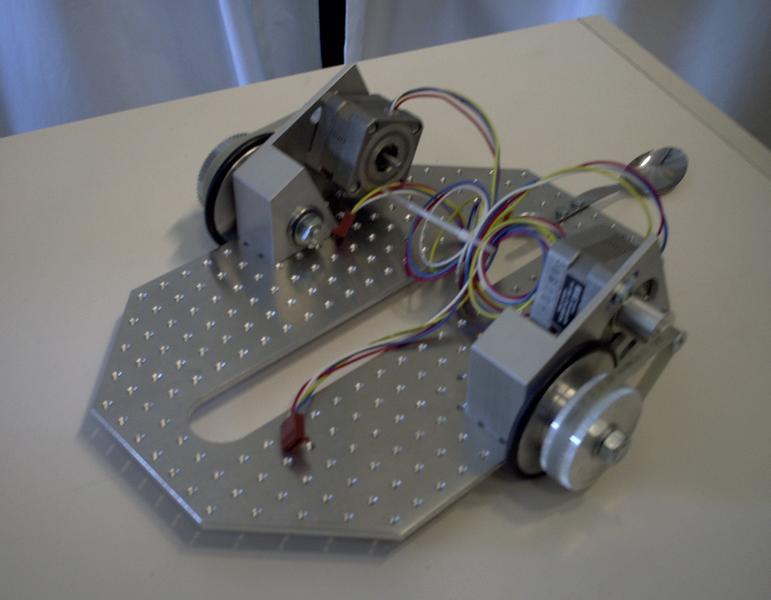 Das Roboterchassis mit montierten Schrittmotoren.
Das Roboterchassis mit montierten Schrittmotoren.