Technisch bedingt ist der Roboter nicht in der Lage die eigene Ausrichtung direkt zu bestimmen. Ihm fehlt ein Kompaß oder ähnliches, mit dem er die Fahrtrichtung erkennen kann. Da er überall festen Untergrund hat und nicht treiben kann, besteht die Möglichkeit, die eigene Ausrichtung in der Ebene indirekt über Positionsbestimmungen zu berechnen. Vorraussetzung ist, daß er eine definierte Strecke geradeaus fahren kann. Die Technik dafür ist vorhanden, für die PWM-Regelung der Motoren werden die Umdrehungen der Antriebswellen schon optisch überwacht und die Daten können odometrisch verarbeitet werden.
Da die Fahrtrichtung und die Botausrichtung vektoriell gleich sind, werde ich in der weiteren Betrachtung für beide den Begriff Kurs verwenden.
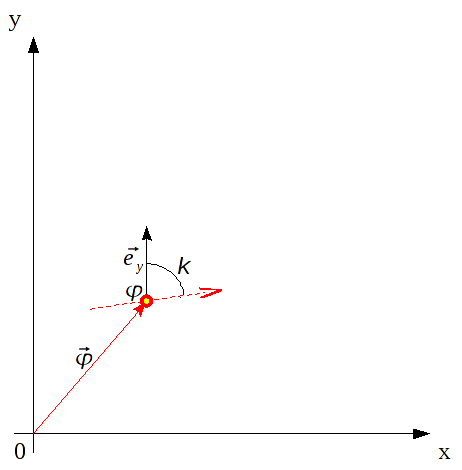
Das φ ist in der Lage, seine Position zu bestimmen und odometrisch sowohl Geradeausfahrten mit definierter Länge, als auch Drehungen auf der Stelle mit definiertem Winkel auszuführen. Ziel ist, mittels dieser Funktionen den eigenen Kurs zu berechnen.
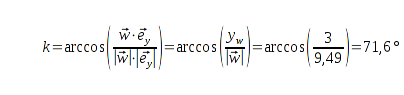
Die Aufgabe ist gelöst, wenn der Bot den Kurswinkel k zwischen der y-Achse und seiner Ausrichtung in der Ebene, hier mit der roten gestrichelten Linie dargestellt, kennt.
 |
Angenommen, der Bot wird irgendwo in sein Revier gestellt und eingeschaltet. Zuerst beginnt er mit der Berechnung seines Standortes. Bevor er einen anderen Ort gezielt anfahren kann, muss er sich in dessen Richtung drehen, und dazu eine Referenz für seine Ausrichtung aufbauen. Dies geschieht, indem er den Vorausbereich auf Hindernisse absucht. Sind welche vorhanden, weitet er seine Suche rundum aus, bis er einen freien Weg voraus hat. Anschließend fährt er eine begrenzte Strecke geradeaus und merkt sich odometrisch die Entfernung w zum Abfahrtspunkt ![]() .
.
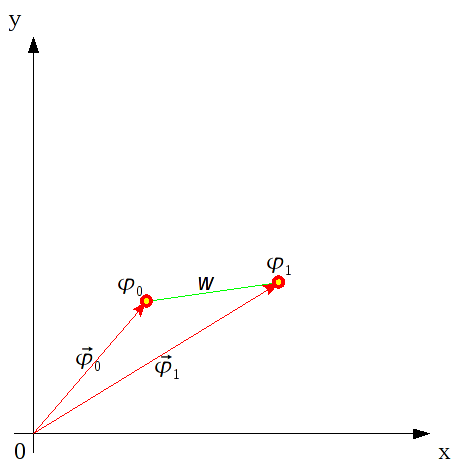 |
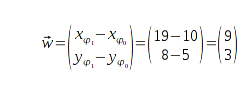
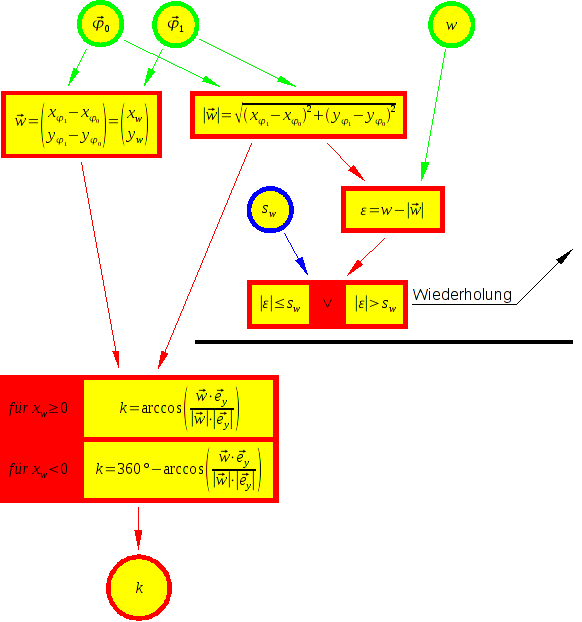
Nun wird der Vektor ![]() , der vom
, der vom ![]() auf
auf ![]() zeigt, bestimmt:
zeigt, bestimmt:
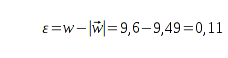
Dessen Betrag kann mit dem zurückgelegten Weg w verglichen werden, und falls die Differenz ε nahe 0 ist, kann darauf geschlossen werden, daß die gefahrene Strecke eine Gerade ist.
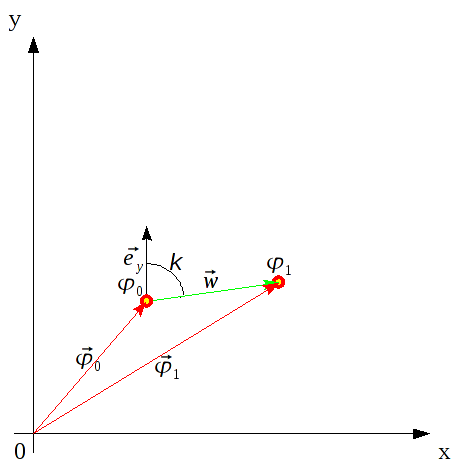 |

Der Roboter hat seinen geraden Weg zurückgelegt und die alte und neue Position bestimmt. Der Schwellwert ist eine gegebene Konstante. Bekannt sind nun:
 |
Die Anfangswerte stammen wieder zur Überprüfung von einer Skizze. Die Ergebnisse sind gerundet.