
Bei der Motorisierung steht an zentraler Stelle die Frage nach dem richtigen Motor. Ist er zu schwach, fährt der Bot nicht vernünftig an oder bekommt Probleme bei Unebenheiten, ist er zu stark, wird unnötig Strom verbraucht. Daher müssen schon vorher gewisse Rahmenbedingungen geklärt werden, um das nötige Drehmoment ermitteln zu können.
Der Drehmomentrechner des RoboterNetzes ist für einfache Abschätzungen sicher gut geeignet.
Ich will aber aus Interesse an der Materie eine genauere Betrachtung durchführen.
Für gewöhnlich liefern die Hersteller von Motoren in deren Datenblättern auch Angaben zum Drehmoment mit, meist auch in Abhängigkeiten zu Spannungen und Drehzahlen. Um den richtigen Motor zu finden, genügt es also, das Drehmoment M zu berechnen, was an der kraftabgebenden Seite des Motors bzw. seines Getriebes nötig ist, um den Roboter antreiben zu können.
Um dieses berechnen zu können, müssen zuerst die relevanten Kräfte bestimmt werden, die beim Fahren auf das φ wirken.
Beim Anfahren muss eine Kraft Ft aufgebracht werden, um die eigene Trägheit zu überwinden. Diese kann berechnet werden, indem man die Masse m mit der Beschleunigung a multipliziert.
Die Masse des φs konnte ich über das Gewicht der Bauteile auf etwa 10 kg abschätzen.
Die Beschleunigung a ist abhängig von der Geschwindigkeit v und dem Zeitraum t, in der diese erreicht werden soll. Es gilt:
Mit v = 1 m/s und t = 5 s ergibt sich eine Beschleunigung von a = 0,2 m/s². Auf diese Werte kam ich bei theoretischen Überlegungen zum dynamischen Verhalten.
Nun läßt sich die Kraft zur Überwindung der Trägheit wie folgt berechnen.
Gleisketten haben gegenüber Rädern eine deutlich höhere Reibung innerhalb des Fahrwerks. Diese entsteht beispielsweise in den Lagern für die Laufrollen oder den beweglichen Elementen der Ketten. Da die gesamte Rollreibung von zahlreichen Parametern abhängt, ist mir ihre Berechnung zu aufwändig. Stattdessen habe ich mir überlegt, diese durch folgenden Versuch zu messen.
Der Fahrzeugrumpf wird auf einen Tisch gestellt, das Fahrwerk ist dabei komplett aufgebaut, lediglich die Motoren fehlen. Das Gesamtgewicht wird durch Zuladung auf 10 kg erhöht und die Federung eingestellt.
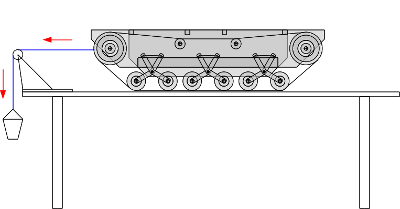 |
Wie in der Skizze zu erkennen ist, wird eine Schnur an dem Rumpf befestigt und über eine Umlenkrolle am Tischrand geführt, sodaß ein Gefäß frei daran hängen kann. Nun wird langsam Wasser in das Gefäß gegossen, bis das Fahrzeug anfängt zu rollen.
Durch die horizontale ebene Fläche erreiche ich eine Reduktion der wirkenden Kräfte auf die Rollreibung. Die Trägheit und die Reibung an der Umlenkrolle darf hierbei vernachlässigt werden. An der Umlenkrolle wird die horizontale Kraft in eine vertikale Kraft überführt und läßt sich damit aus der Erdbeschleunigung g und der Masse mr des Gefäßes wie folgt berechnen:
--- wird fortgesetzt, wenn das Fahrwerk fertig ist ---